Camera Geometries¶
The CameraGeometry provides an easy way to work with images or data
cubes related to Cherenkov Cameras. In ctapipe, a camera image is
simply a flat 1D array (or 2D if time information is included), where
there is one value per pixel. Of course, to work with such an array,
one needs spatial information about how the pixels are laid out.
Since CTA has at least 6 different camera types, and may have multiple
versions of each as revisions are made, it is necessary to have a
common way to describe all cameras.
So far there are several ways to construct a CameraGeometry:
use the
CameraGeometryconstructor, where one has to specify all necessary information (pixel positions, types, areas, etc)use
CameraGeometry.from_name(telescope, revision)(ex:geom = CameraGeometry.from_name('HESS',1)). This reads the telescope def from the$CTAPIPE_EXTRAdirectory, and so far we only have HESS telescopes there (more to come)load a Monte-Carlo file, get the list of pixel X and Y positions and the telescope focal length and use
CameraGeometry.guess(x,y,flen)- this will work for all telescopes in CTA so farload it from a pre-written file (which can be in any format supported by
astropy.table, as long as that format allows for header-keywords as well as table entries.
Once loaded, the CameraGeometry object gives you access the pixel
positions, areas, neighbors, and shapes.
CameraGeometry is used by most image processing algorithms in the
ctapipe.image module, as well as displays in the
ctapipe.visualization module.
Input/Output¶
- You can write out a
CameraGeometryby using theCameraGeometry.to_table() - method to turn it into an
astropy.table.Table, and then call itswrite function. Reading it back in can be done with
CameraGeometry.from_table()
- method to turn it into an
geom = CameraGeometry(...) # constructed elsewhere
geom.to_table().write('mycam.fits.gz') # FITS output
geom.to_table().write('mycam.h5', path='/cameras/mycam') # hdf5 output
geom.to_table().write('mycam.ecsv', format='ascii.ecsv') # text table
# later read back in:
geom = CameraGeometry.from_table('mycam.ecsv', format='ascii.ecsv')
geom = CameraGeometry.from_table('mycam.fits.gz')
geom = CameraGeometry.from_table('mycam.h5', path='/cameras/mycam')
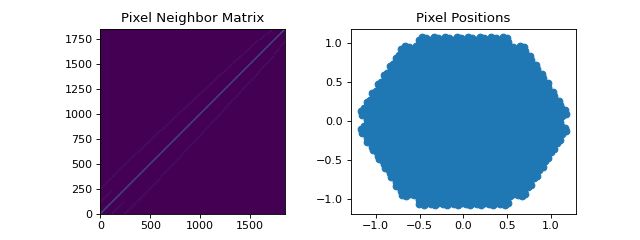
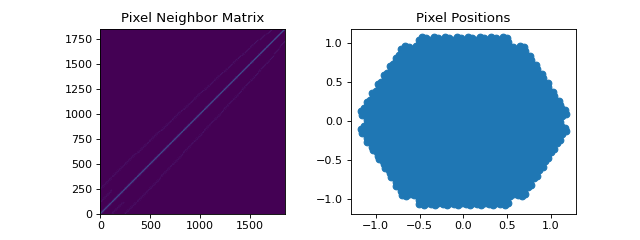
A note on Pixel Neighbors¶
The CameraGeometry object provides two pixel-neighbor
representations: a neighbor adjacency list (in the neighbors
attribute) and a pixel adjacency matrix (in the neighbor_matrix
attribute). The former is a list of lists, where element i is a
list of neighbors j of the i*th pixel. The latter is a 2D matrix
where row *i is a boolean mask of pixels that are neighbors. It is
not necessary to load or specify either of these neighbor
representations when constructing a CameraGeometry, since they
will be computed on-the-fly if left blank, using a KD-tree
nearest-neighbor algorithm.
It is recommended that all algorithms that need to be computationally
fast use the neighbor_matrix attribute, particularly in conjunction
with numpy operations, since it is quite speed-efficient.
Examples¶
from ctapipe.instrument import CameraGeometry
from matplotlib import pyplot as plt
geom = CameraGeometry.from_name("LSTCam")
plt.figure(figsize=(8, 3))
plt.subplot(1, 2, 1)
plt.imshow(geom.neighbor_matrix, origin="lower")
plt.title("Pixel Neighbor Matrix")
plt.subplot(1, 2, 2)
plt.scatter(geom.pix_x, geom.pix_y)
plt.title("Pixel Positions")
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
See also ctapipe.image.tailcuts_clean() and ctapipe.image.dilate()
for usage examples.
Reference/API¶
ctapipe.instrument.camera.geometry Module¶
Utilities for reading or working with Camera geometry files
Classes¶
|
|
|
Supported Pixel Shapes Enum |