Visualization (visualization)¶
Introduction¶
This module provides methods to display various information related to events and reconstruction, like Cherenkov Camera images, image parameterizations, etc. The default implementation uses MatPlotLib to render displays, but in the future more rendering methods may be supported.
The main classes are:
Getting Started¶
#!/usr/bin/env python3
"""
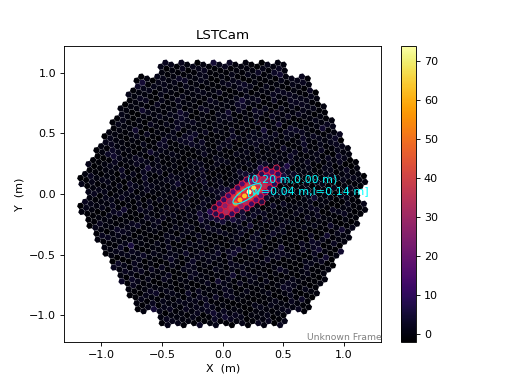
Example of drawing a Camera using a toymodel shower image.
"""
import matplotlib.pylab as plt
import astropy.units as u
from ctapipe.image import toymodel, hillas_parameters, tailcuts_clean
from ctapipe.instrument import CameraGeometry
from ctapipe.visualization import CameraDisplay
if __name__ == "__main__":
# Load the camera
geom = CameraGeometry.from_name("LSTCam")
disp = CameraDisplay(geom)
disp.add_colorbar()
# Create a fake camera image to display:
model = toymodel.Gaussian(
x=0.2 * u.m, y=0.0 * u.m, width=0.05 * u.m, length=0.15 * u.m, psi="35d"
)
image, sig, bg = model.generate_image(geom, intensity=1500, nsb_level_pe=2)
# Apply image cleaning
cleanmask = tailcuts_clean(geom, image, picture_thresh=10, boundary_thresh=5)
clean = image.copy()
clean[~cleanmask] = 0.0
# Calculate image parameters
hillas = hillas_parameters(geom, clean)
print(hillas)
# Show the camera image and overlay Hillas ellipse and clean pixels
disp.image = image
disp.cmap = "inferno"
disp.highlight_pixels(cleanmask, color="crimson")
disp.overlay_moments(hillas, color="cyan", linewidth=1)
plt.show()
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
Reference/API¶
ctapipe.visualization Package¶
Visualization: Methods for displaying data
Classes¶
|
Camera Display using matplotlib. |
|
Display a top-town view of a telescope array. |